Welcome to
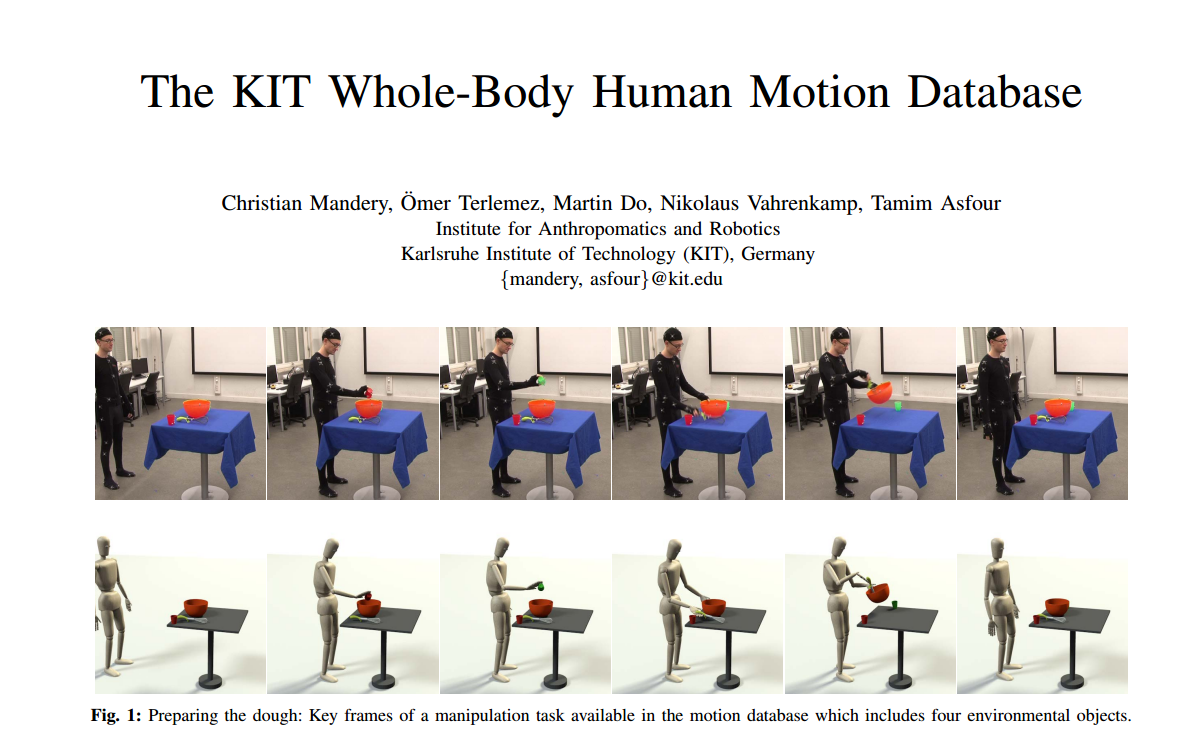
The KIT Whole-Body Human Motion Database
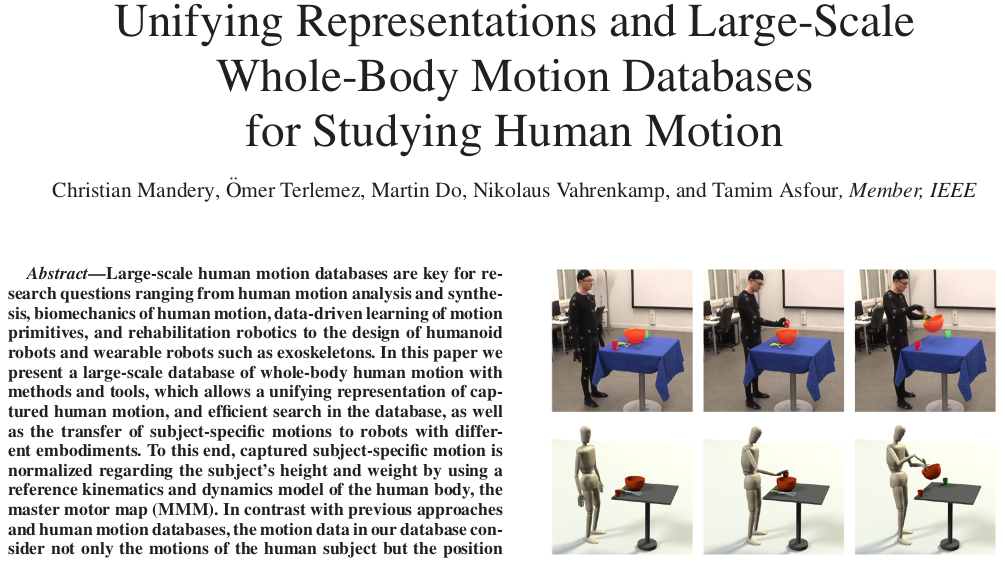
Abstract - Large-scale human motion databases are key for research questions ranging from human motion analysis and synthesis, biomechanics of human motion, data-driven learning of motion primitives, and rehabilitation robotics to the design of humanoid robots and wearable robots such as exoskeletons. In this paper we present a large-scale database of whole-body human motion with methods and tools, which allows a unifying representation of captured human motion, and efficient search in the database, as well as the transfer of subject-specific motions to robots with different embodiments. To this end, captured subject-specific motion is normalized regarding the subject’s height and weight by using a reference kinematics and dynamics model of the human body, the master motor map (MMM). In contrast with previous approaches and human motion databases, the motion data in our database consider not only the motions of the human subject but the position and motion of objects with which the subject is interacting as well. In addition to the description of the MMM reference model, we present procedures and techniques for the systematic recording, labeling, and organization of human motion capture data, object motions as well as the subject–object relations. To allow efficient search for certain motion types in the database, motion recordings are manually annotated with motion description tags organized in a tree structure. We demonstrate the transfer of human motion to humanoid robots and provide several examples of motion analysis using the database.
„Unifying Representations and Large-Scale Whole-Body Motion Databases for Studying Human Motion“
by Mandery et al. (2016)
Publications
Referencing the KIT Whole-Body Human Motion Database
If you are using the motion database as a whole or other motion recordings not corresponding to a published dataset, please cite the following citations:
@ARTICLE {Mandery2016b,
author = {Christian Mandery and \"Omer Terlemez and Martin Do and Nikolaus Vahrenkamp and Tamim Asfour},
title = {Unifying Representations and Large-Scale Whole-Body Motion Databases for Studying Human Motion},
pages = {796--809},
volume ={32},
number ={4},
journal ={IEEE Transactions on Robotics},
year = {2016},
}
Otherwise, if you are using specific motions corresponding to a published dataset, please cite the dataset, such as our KIT Bimanual Manipulation Dataset:
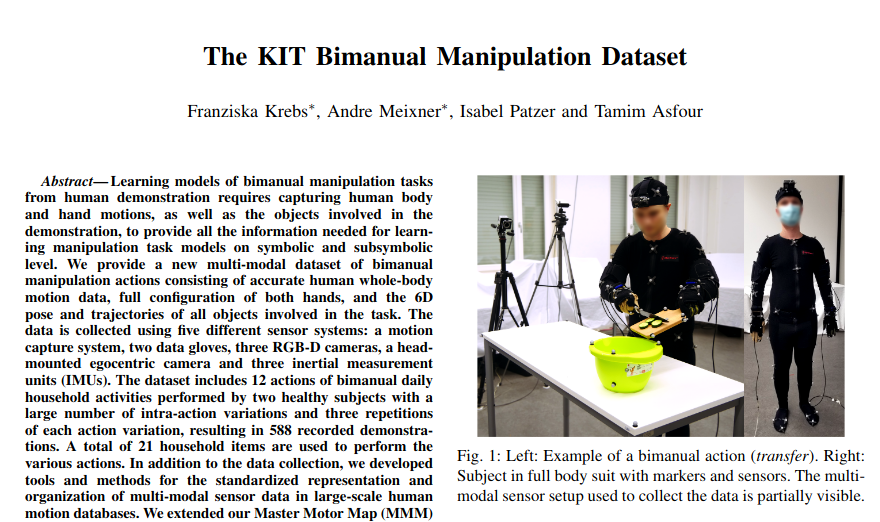
@INPROCEEDINGS {KrebsMeixner2021,
author = {Franziska Krebs and Andre Meixner and Isabel Patzer and Tamim Asfour},
title = {The KIT Bimanual Manipulation Dataset},
booktitle = {IEEE/RAS International Conference on Humanoid Robots (Humanoids)},
pages = {499--506},
year = {2021},
}
Interested in our publications:
Unifying Representations and Large-Scale Whole-Body Motion Databases for Studying Human Motionby Christian Mandery et al., 2016 Bibtex Read |